One of the responsibilities of the Technical Coordinator in the Ohio Section is to submit something for the Section Journal. The Section Journal covers Amateur Radio related things happening in and around the ARRL Ohio Section. It is published by the Section Manager Tom – WB8LCD and articles are submitted by cabinet members.
Once my article is published in the Journal, I will also make it available on my site with a link to the published edition.
You can receive the ARRL Ohio Section Newsletter and other Ohio Section news by joining the mailing list. Anyone can join and do not need to be a member of the ARRL, Ohio Section, or even a ham to join the mailing list. Please sign up! NOTE: If you do not see the Mailchimp “Subscribe to the ARRL Ohio Section Newsletter” signup form just below the page heading, disable cosmetic filtering in uBlock Origin or check browser plugins for similar blocking.
If you are an ARRL member and reside in the Ohio Section, update your mailing preferences to receive Ohio Section news in your inbox. Those residing outside the Ohio section will need to use the mailing list link above. Updating your ARRL profile will deliver news from the section where you reside (if the leadership chooses to use this method).
When logged in successfully, it will say “Hello <Name>” in place of the Login button where <Name> is your name. Click your Name. This will take you to the “My Account” page.
On the left hand side, under the “Communication” heading (second from the bottom), click Opt In/Out (or direct link)
To the right of the “Opt In/Out” heading, click Edit
Check the box next to “Division and Section News.” If it is already checked, you are already receiving the Ohio Section Journal.
Click Save
There should now be a green check mark next to “Division and Section News.” You’re all set!
THE TECHNICAL COORDINATOR
Jeff Kopcak – TC
k8jtk@arrl.net
Hey gang,
Delete, Delete, Delete! No, not your browsing history. The ARRL posted the Public Notice released by the FCC Chairman requesting input into deleting a whole bunch of regulations. “… the FCC is soliciting public input on any FCC rules in any service that members of the public believe should be deleted or modified “for the purpose of alleviating unnecessary regulatory burdens.”
The Trump administration and their goal of making the government efficient (again?), the FCC Chairman is looking to remove regulation that is no longer needed or relevant. When most hams read that, they probably assume they’re taking only about Ham Radio. In this case, they are seeking input from the pubic and everything under the FCC’s authority is fair game. All frequencies and many communication methods are regulated by the FCC, such as: GMRS, AM/FM/TV broadcast stations, satellite communication, emergency communication methods, 911/E-911, commercial operators, public mobile services, antenna structures, ISM (industrial, scientific, and medical) bands and devices, cellular services, telephony, experimental services, maritime services, aviation services, microwave services, Internet services, cable television, Citizens Band, and, of course, Ham Radio.
The FCC plays an important part in the roll out of any radio frequency service. They are the coordinators of standards, practices, and making sure another service doesn’t interfere with or take over another service. There is no doubt something or someone needs to oversee and regulate services. Question becomes: how much
Pressure from lobbyists, entities with financing, and those out in front of specifications often have the upper hand due to influence and market position. Most want less regulation but we also want our stuff to work. Most regulation comes from vaguely written laws. Regulation stem from implementation, legal challenges, and administrative issues due to questions. Larger commercial entities are always looking at ways to improve their revenue steam and increase the stock price.
Over the years, many regulations were changed, amended, or restructured for the Amateur Radio service. Including a program of ham volunteers to administer examinations (aka, VE Program) instead of the FCC, unification of license terms to 10 years, removal of the Morse Code examination requirement, consolidation of license classes and types, and elimination of RACES licenses.
“Delete, Delete, Delete” is an opportunity to improve the Ham Radio service. How many times have we seen online, in a forum, or a club meeting where hams are complaining that ‘we can’t do X because there is this old rule that still says Y…’? This is the time to improve on and remove those restrictions and situations.
Maybe there are modernization projects that can get underway by removing legacy standards. Maybe the symbol rate removal on the HF bands doesn’t go far enough. Should it be 2.8 kHz across all bands or more with higher frequencies? Maybe you think station evaluations are a dumb idea and a pointless exercise that no one is doing. Maybe expand 440 sub-bands for technologies such as TETRA repeaters to accommodate 10 MHz splits in ham bands. Maybe consolidate or eliminate sub-bands. Maybe identifying with the station’s call sign every 10 minutes is burdensome, especially on digital modes. Maybe licensing fees or exams should be eliminated altogether. Maybe the legal limit (power) should be raised or removed. Maybe allow encryption for message authentication and network security. Everything is up for debate.
This, by no means, guarantees any changes to the Ham Radio service or that all changes will happen without unintended consequences. This also doesn’t necessarily mean that Ham Radio will be around when the dust settles. If you follow other Ham Radio commentators, their click-bait headlines and titles suggest this is a possibility – could this be the end of Ham Radio? Now, there is no indication elimination of the Amateur Radio service is in play.
However, changes no one saw coming are a possibility. One might be Amateur Radio is no longer managed the FCC. The FCC sets aside spectrum for Ham Radio but leaves management to an oversight body, like the ARRL, which becomes responsible for rule making and standards. Privatization, if you will. Much like the FCC is no longer in charge of examinations and question pools.
Even if you don’t care about any of the technical regulations, standards, or don’t think anything needs changing, use your input to remind the FCC of the importance of Ham Radio. We’ve seen it before where ham frequencies are given up in favor of commercial, paying interests. At a minimum, we all can remind the FCC about the importance of Ham Radio for emergency communication and a place for radio experimentation and development. The last page of the Public Notice provides accepted ways to comment.
There isn’t much time, though. Comments are due by Friday, April 11, 2025 – a couple days after OSJ publication.
One of the responsibilities of the Technical Coordinator in the Ohio Section is to submit something for the Section Journal. The Section Journal covers Amateur Radio related things happening in and around the ARRL Ohio Section. It is published by the Section Manager Tom – WB8LCD and articles are submitted by cabinet members.
Once my article is published in the Journal, I will also make it available on my site with a link to the published edition.
You can receive the ARRL Ohio Section Newsletter and other Ohio Section news by joining the mailing list. Anyone can join and do not need to be a member of the ARRL, Ohio Section, or even a ham to join the mailing list. Please sign up! NOTE: If you do not see the Mailchimp “Subscribe to the ARRL Ohio Section Newsletter” signup form just below the page heading, disable cosmetic filtering in uBlock Origin or check browser plugins for similar blocking.
If you are an ARRL member and reside in the Ohio Section, update your mailing preferences to receive Ohio Section news in your inbox. Those residing outside the Ohio section will need to use the mailing list link above. Updating your ARRL profile will deliver news from the section where you reside (if the leadership chooses to use this method).
When logged in successfully, it will say “Hello <Name>” in place of the Login button where <Name> is your name. Click your Name. This will take you to the “My Account” page.
On the left hand side, under the “Communication” heading (second from the bottom), click Opt In/Out (or direct link)
To the right of the “Opt In/Out” heading, click Edit
Check the box next to “Division and Section News.” If it is already checked, you are already receiving the Ohio Section Journal.
Click Save
There should now be a green check mark next to “Division and Section News.” You’re all set!
THE TECHNICAL COORDINATOR
Jeff Kopcak – TC
k8jtk@arrl.net
Hey gang,
Were you a ham and don’t remember a previous call? Want to fill in gaps of previous callsigns? Need proof a license was held previously for exam credit? Have a vanity callsign and curious about whom held it previously? Pete “The Greek” – NL7XM is a Radio Amateur Callsign Historian.
Pete provides this unique service with his collection of Callbooks dating back to 1909. “He can research license dates, find lost Callsigns, or get past proof for FCC Lifetime Credit at very reasonable terms” according to his eHam.net page.
For hams that grew up in the 2000’s or later, not everything is on the Internet. Information was disseminated in these printed things called books. You couldn’t always go to QRZ.com, or other favorite callsign lookup, to find information about another ham. Instead, a Callbook could be purchased by individuals or clubs. Inside would be the entire listing of Amateur Radio stations. Often beginning with the 10th call district (stations with “0” in their callsign) and sorted by call suffix. Information would include class identification (Novice, Tech, Conditional, General, Advanced, Extra, Club, Military, Repeater) and station contact address. These Callbooks were usually published regionally (eg: North America) and multiple times throughout the year (eg: winter, fall, spring). Later editions were thousands of pages.
If you’re reading this and were a ham previously, interested in re-joining the ranks, use Pete’s service to find previous licenses which may gain automatic exam credit. Maybe jog the memory on previous callsigns. Some may have lost their license in a move, misplaced paperwork, threw it away thinking you’ll never need it again only to regret that decision later. If Pete can find your previous license, usually with the help of approximate dates, he can send a copy which is valid proof of holding a license previously.
Ways to gain exam element credit are listed on this ARRL VEC page. Questions or clarifications, the ARRL VEC has helped many candidates understand the process. They often reach out to the local VEC, where the candidate expects to take the exam, informing that team how to process the application.
Reading through some of the comments, Pete has helped find a radio club’s previous callsigns, ones which had been forgotten. He’s found when current license holders were first licensed, because that person had forgotten exactly. Found Novice callsigns of current hams. Callsigns held by other relatives such as father, grandparents, uncles, or cousins. Pete has even tracked down current contact information to help authors doing research for articles and stories.
I heard about Pete on Ham Nation and I contacted him a few years ago. I was curious about previous holder/s of my callsign. My original call was KC8MWP but I changed it almost immediately to include my initials, K8JTK, and have held it ever since. Since mine is a vanity call, I was not the original holder. Every once-in-a-while on-air someone would say ‘I knew someone in the area that used to have that call.’
One day, I wrote Pete and asked him to put together a history of previous holders (again figuring multiple people held it previously). Since my query was for my own edification, I told him he could put my request at the end of the pile because those that needed his services for license verification, I felt, were more important.
As it turned out, he did have a pile and got to my request about a month later. This was a few years ago, recent reviews indicate a much quicker turnaround time. It appears the workload has lightened!
“PeteTheGreek” – NL7XM and his vast collection of Callbooks (eHam.net)
Pete’s research found only one previous holder of my current callsign, and it was a YL:
“Opal J. Glenn of 736 Arlington Rd. in Bangor, Mich. held the call for almost exactly 10 years from about July 1958 until the summer of 1968. There’s no further information found about her after that.”
Only one previous holder of my callsign, I had no idea. I suspect locals remembered the callsign incorrectly or thought it was something else.
Recently, I did some quick research to see if she was still living or had passed. Nothing online. Searched that address and the road appears to have been renamed “W Arlington St.” A house with that exact number exists on W. Arlington St., according to Google Maps. I would suspect contacting the local Historical Society could provide more information, if I was so inclined. I haven’t been (yet).
In the footer of Pete’s reply, he requests leaving a review on his E-ham page. In addition, accepts donations via his PayPal. He provided me value with his service and his time researching, I gave some value back by throwing him a couple bucks.
He was very grateful for both my review and donation. He lamented the fact he’ll spend hours conducting research they asked for and promised a few “shekels.” They don’t even send a note back saying thanks or ever send him anything. Frankly, I’m embarrassed by that and hope that is the exception rather than the rule.
One of the responsibilities of the Technical Coordinator in the Ohio Section is to submit something for the Section Journal. The Section Journal covers Amateur Radio related things happening in and around the ARRL Ohio Section. It is published by the Section Manager Tom – WB8LCD and articles are submitted by cabinet members.
Once my article is published in the Journal, I will also make it available on my site with a link to the published edition.
You can receive the ARRL Ohio Section Newsletter and other Ohio Section news by joining the mailing list. Anyone can join and do not need to be a member of the ARRL, Ohio Section, or even a ham to join the mailing list. Please sign up! NOTE: If you do not see the Mailchimp “Subscribe to the ARRL Ohio Section Newsletter” signup form just below the page heading, disable cosmetic filtering in uBlock Origin or check browser plugins for similar blocking.
If you are an ARRL member and reside in the Ohio Section, update your mailing preferences to receive Ohio Section news in your inbox. Those residing outside the Ohio section will need to use the mailing list link above. Updating your ARRL profile will deliver news from the section where you reside (if the leadership chooses to use this method).
When logged in successfully, it will say “Hello <Name>” in place of the Login button where <Name> is your name. Click your Name. This will take you to the “My Account” page.
On the left hand side, under the “Communication” heading (second from the bottom), click Opt In/Out (or direct link)
To the right of the “Opt In/Out” heading, click Edit
Check the box next to “Division and Section News.” If it is already checked, you are already receiving the Ohio Section Journal.
Click Save
There should now be a green check mark next to “Division and Section News.” You’re all set!
THE TECHNICAL COORDINATOR
Jeff Kopcak – TC
k8jtk@arrl.net
Hey gang,
Are you active on DMR and Brandmeister? Have you been inactive on Brandmeister for a time and your ID no longer seems to work? Most importantly, does your DMR ID begin with a “1”? If so, you need to obtain a new DMR ID.
What is a DMR ID? It is a unique subscriber (user) identification mechanism, containing 7 digits, for use on digital radio systems and networks. Ham radio has adopted this commercial standard for use on our own digital networks. Users registered in Ohio are assigned 3139xxx, where ‘xxx’ is a 3-digit consecutive ID. Ohio Statewide DMR talkgroup is 3139 and the first Ohio subscriber IDs began with the same. Though a “DMR ID” is universally accepted on any DMR network, it’s also accepted on other platforms using a 7-digit ID, such as P25.
As the popularity of DMR exploded, Ohio and many other states ran out of the 1,000 available IDs. That is 3139000 – 3139999. When that happened, keepers of the registration system at the time, DMR-MARC, decided to issue IDs beginning with a 1 resulting in IDs: 1139xxx. These IDs were issued about seven years ago. DMR IDs are now managed by RadioID.
IDs beginning with a 1 do not follow the Mobile County Code (MCC) standard and cause issues for some amateur radio DMR network administrators. The first three digits of an ID make up the mobile country code with the first digit identifying the geographic region. “3” identifies communications from North America and the Caribbean. According to the Wikipedia article, 1 and 8 are not used. Others reference 1 (as well as 0) being used for test networks.
Brandmeister’s announcement states 7-digit personal DMR IDs beginning with a 1 (such as 1139xxx in Ohio) will stop working, at the latest, January 1, 2026. If the ID has not been used “for more than a couple months” it will be purged before Jan 1. Analysis using the RadioID database search and dumps show 5,300 DMR IDs assigned in Ohio. 900 of those IDs begin with a 1. Nearly 1-in-5 users in Ohio need their DMR ID updated (as of this writing) before Jan 1, 2026 in order to continue using the Brandmeister network. All DMR IDs starting with a 1 will cease to work at the end of 2025 on Brandmeister.
6-digit repeater radio IDs beginning with a 1 (such as 1139xx in Ohio) will stop working sometime in the future. A date when these IDs will stop working has not been set (as of this writing). RadioID database search shows five repeater IDs are affected in Ohio (as of this writing).
5-digit CAP+ (Capacity Plus) IDs will stop working June 1, 2025. Capacity Plus is a popular Motorola commercial controller-less trunking system. I didn’t know it was used much in ham radio except for areas in Texas. As seen in a database search, five CAP+ IDs are issued in Ohio (as of this writing). Some NXDN IDs are also five digits but they are not the same as CAP+ IDs.
What prompted this change? Aside from not following the MCC standards, this causes problems with Brandmeister’s “operations, scripting, and automation.”
Now, I get it – I have obsessive compulsive tendencies and want everything to fit nicely into a defined structure. I’ve also worked professionally in programming and system administration having the desire for data to be correct only to be overridden in favor of convenience. Instead instructed to ‘make it work’ adapting programs to accept ‘bad’ data. In particular, data generated by other facilities, systems, or means which we did not have control.
Sure, it took extra time to code, test, and validate but far less effort than having a majority of customers redo a set of steps. Shifting responsibility to users will introduce additional errors, users will not want to redo work with no additional benefit gained, time waiting for users to complete, forgotten passwords, not remembering if they have an account. The list goes on. They already did it once, why would they do it again? Users will think they don’t need to complete steps again even when explicitly informed they need to do so.
Is this an issue with the software Brandmeister is using to run the network not accepting IDs beginning with a 1? Don’t know, they didn’t say. Most (ham) networks are built using open-source software and they apparently don’t want to modify it. Their own statements identify 1 as a valid, albeit test, network type. If it’s their “scripting and automation,” why not just change it?
Brandmeister has decided to take the opposite approach and make RadioID correct subscriber data. It’s an easy decision when you’re the 800-pound gorilla and one that doesn’t have to do the work. Brandmeister doesn’t have to get thousands of users to log on, “fix” their IDs and update equipment. RadioID can’t unilaterally fix all IDs that begin with a 1 without notifying users because users will still need to update codeplugs.
RadioID updated their portal to include a self-service way to correct an ID beginning with a 1 just a few days ahead of this publication. Users still need to logon, complete the steps to obtain a new DMR ID, update code plugs, upload the new ID to their radios, and update IDs entered into hotspots and apps, such as DroidStar. If you don’t use Brandmeister, it’s still a good idea to complete these steps because other networks may decide to follow suit since Brandmeister made this a requirement to use their network.
Updating a 1n DMR ID to a 3n ID:
Go to: https://radioid.net/
Click Logon.
Forgot password, click Pass Reset. Enter the callsign associated with the account and follow instructions to reset the password.
Don’t have an account, Register for one. It may take some time to validate license information.
After logging on, ignore/close popups prompting to subscribe unless one wishes to support the work RadioID is doing.
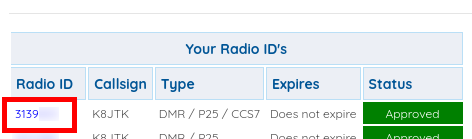
Under the “Your Radio ID’s” section, click the appropriate DMR Radio ID that needs to be changed.
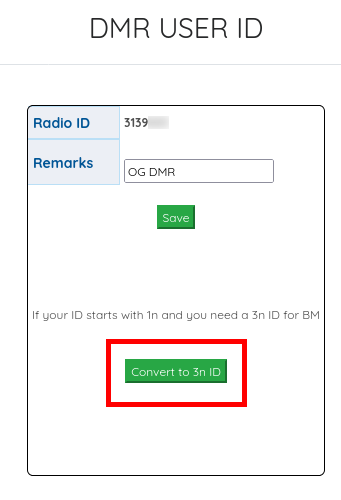
On the “DMR USER ID” popup screen, “If your ID starts with 1n and you need a 3n ID for BM” click Convert to 3n ID.
When the new ID is received, update codeplugs, radios, hotspots, and apps. Get this done sooner-than-later to avoid the end-of-year rush of those who procrastinated avoiding delays associated with a pending deadline.
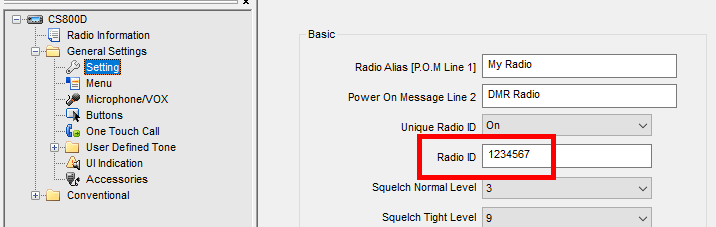
DMR ID in Connect Systems CPS. Radio -> General Settings -> Setting -> Radio ID. Update with the new DMR ID.
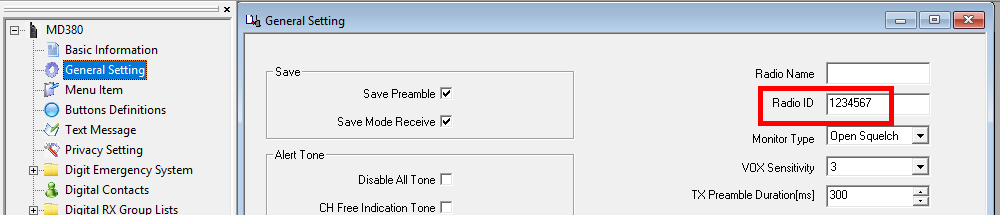
DMR ID in MD380 CPS. Radio -> General Setting -> Radio ID. Update with the new DMR ID.
DMR ID in Pi-Star (WPSD). Dashboard -> Admin -> Configuration -> DMR/CCS7 ID. Update with the new DMR ID.
If there are any issues updating an ID or accessing a RadioID profile, open a ticket with RadioID support. Do NOT create a ticket with Brandmeister Self-Care because they won’t be able to help. Doing so will cause additional delays in obtaining a new ID and they will direct you to RadioID anyway.
I’m not sure if Brandmeister is going to contact users whom are still using IDs beginning with 1 or, more likely, just cut off those users to the Brandmeister network. In the past, it isn’t like them to communicate major system changes to users other than posting on a section of their site users don’t typically visit and users don’t frequently visit the Brandmeister homepage. It may end up being that RadioID might contact users, but I don’t think I’ve ever received communication from them either despite having a current E-mail address on both services.
Make sure to pass the word around to other DMR users, family members on DMR, clubs that have DMR IDs, organizations and clubs that use DMR or have DMR nets. Chances are a number of users will need to complete these steps. 1-in-5 in Ohio alone need to update their ID. One can use the Database Online Search (then click DMR User/RPTR ID Search) searching call signs (or other field) to notify friends/family/club members to update their DMR ID. If your ID is compliant, take this opportunity to log on to RadioID and check the accuracy of profile details.
One of the responsibilities of the Technical Coordinator in the Ohio Section is to submit something for the Section Journal. The Section Journal covers Amateur Radio related things happening in and around the ARRL Ohio Section. It is published by the Section Manager Tom – WB8LCD and articles are submitted by cabinet members.
Once my article is published in the Journal, I will also make it available on my site with a link to the published edition.
You can receive the ARRL Ohio Section Newsletter and other Ohio Section news by joining the mailing list. Anyone can join and do not need to be a member of the ARRL, Ohio Section, or even a ham to join the mailing list. Please sign up! NOTE: If you do not see the Mailchimp “Subscribe to the ARRL Ohio Section Newsletter” signup form just below the page heading, disable cosmetic filtering in uBlock Origin or check browser plugins for similar blocking.
If you are an ARRL member and reside in the Ohio Section, update your mailing preferences to receive Ohio Section news in your inbox. Those residing outside the Ohio section will need to use the mailing list link above. Updating your ARRL profile will deliver news from the section where you reside (if the leadership chooses to use this method).
When logged in successfully, it will say “Hello <Name>” in place of the Login button where <Name> is your name. Click your Name. This will take you to the “My Account” page.
On the left hand side, under the “Communication” heading (second from the bottom), click Opt In/Out (or direct link)
To the right of the “Opt In/Out” heading, click Edit
Check the box next to “Division and Section News.” If it is already checked, you are already receiving the Ohio Section Journal.
Click Save
There should now be a green check mark next to “Division and Section News.” You’re all set!
THE TECHNICAL COORDINATOR
Jeff Kopcak – TC
k8jtk@arrl.net
Hey gang,
When was the last time your operating underwent a major change or ventured to try something new? We all get in our comfort zones and decide, for various reasons, not to go for something different. Going from operating amplifiers and high-end base stations to barefoot and a wire for a POTA activation. Operating digital radios using hotspots to building an HF station or operating at 10 GHz. Even within your local club being a technical resource and change to a leadership position like President/Vice President, Secretary, or Treasurer. Maybe help out in a different area assisting the Newsletter editor with publication or contributing content.
Just this past year, I found myself facing new challenges and changes, both personally and professionally. I promise this won’t be riddled with crappy business catch phrases and “tech bro” talk. Primary, I work with firewalls and remote access technologies. Last year, I was on two M&A (merger and acquisitions) projects as lead for Information Security. M&As happen when a company decides to purchase (in part or in whole) another company. The goal of the project is to evaluate the current situation of the company being acquired from a technology perspective. Changes happen to technology and processes which follow the new owner’s standards.
I’m responsible for relaying and enforcing company policy and practices, like when a vendor wants wide open remote access, from the Internet, to the new owner’s network. Hello, Target? Also making sure the right people are involved when the business asks for something related to Information Technology security. This is addition to integrating and configuring technologies I’m responsible. One M&A project was the reason I was able to make a return stop at ARRL HQ last year.
To be cliché, this is where you find yourself. One might be good at technical aspects but find they like administrative tasks or discover one of the billion other things you can do with ham radio. Well-rounded individuals have skills and experiences across various areas, typically making them more desirable in their profession and community.
Need ideas or a place to discover those billions of other things in ham radio, the ARRL has four online publications (or in some cases print):
QST – monthly publication including news, reviews, technical tips, and projects
On The Air – for beginners and experts alike covering a wide range of operating interests and topics
QEX – bimonthly technical publication featuring experimentation, technical articles, and columns for hams and radio professionals
NCJ – bimonthly contesting journal with hints, stats, scores, and QSO parties
Current ARRL members have access to the latest issues online through the links above or can search past articles. Non-members can find these resources on the ARRL Periodical DVD available for the last couple years via the store (under Station Resources), try the local library, or ask a member to borrow theirs.
Earlier this year was the start of my next major change in ham radio: recovering from storm damage. Or possible tornado – you know, whichever is more attention grabbing. In that article and in addition to the storm damage, I mentioned the shack itself would soon need replacing. Well, soon is now.
QEX – November/December 2024 cover (ARRL)
This was something that happened over time and due to age. It wasn’t something that happened out of nowhere. If you don’t know or haven’t seen my QSL card, my shack was an old pull-behind travel trailer (also known as an RV trailer or camper). I checked with Mom and it’s older than we thought. The last time it was out and used as a recreational vehicle was about 1998-99. Since then, it was used for storage until I had the bright idea to get on HF about 10 years ago and Dad (SK) thought it would be good to use as a shack.
Even then it was showing its age. A little tar on the roof and some patch work put a stop to major issues. For the time being. With the rain storms just before New Years, it gave up the ghost. It was showing signs of water damage (again) over the summer. By the end of the year, it became too much. No equipment was damaged but New Years Eve was spent shuttling ham gear into the house for safe keeping.
I have been looking out for cabin or shed builders in the area. Maybe I stick with the somewhat mobile theme and get a toy hauler – except the toys would be ham gear. I’ve also seen hams with their shacks in a tool or hobby shed. My preference is to keep the shack isolated from the house if (when?) another lightning bolt takes out the antenna (the first time the antenna was destroyed) it doesn’t cause other issues in the house.
To make matters worse (which just means I have to come up with more solutions), both trees which held up ends of my 100′ wire antenna sustained damage in the August storm and one was removed due to proximity of houses. With no other trees to support a horizontally polarized antenna of that length, I could go vertical or install a solution the neighbors won’t be happy with, or maybe both. A tower would be nice to get my VHF/UHF antennas up higher and some SHF equipment on there too. A possibility would be to setup antennas inside the house as a temporary workaround. You know what they say about workarounds, they become permanent solutions. Alot of things to think about and a lot of work to be done.
I’ve always said my operating interests were computer based and, in recent years, added networking. It looks like mine will shift from mostly digital operation on the HF bands to HT operations using IP devices, such as hotspots, mesh, and maybe more SDRs.
How old is that travel trailer? 45, coming up on 46 years old.
The story of an Alabama broadcaster that received global news coverage, and covered here last March, has taken an unfortunate turn. Owner and general manager of WJLX in Jasper, Alabama, Brett Elmore has died at 41 according to AR Newsline. Elmore made headlines after reporting the AM radio station’s tower was stolen mysteriously overnight last February. The case remains unsolved. No cause of death or what will happen to the AM broadcast station was given.
One of the responsibilities of the Technical Coordinator in the Ohio Section is to submit something for the Section Journal. The Section Journal covers Amateur Radio related things happening in and around the ARRL Ohio Section. It is published by the Section Manager Tom – WB8LCD and articles are submitted by cabinet members.
Once my article is published in the Journal, I will also make it available on my site with a link to the published edition.
You can receive the ARRL Ohio Section Newsletter and other Ohio Section news by joining the mailing list. Anyone can join and do not need to be a member of the ARRL, Ohio Section, or even a ham to join the mailing list. Please sign up! NOTE: If you do not see the Mailchimp “Subscribe to the ARRL Ohio Section Newsletter” signup form just below the page heading, disable cosmetic filtering in uBlock Origin or check browser plugins for similar blocking.
If you are an ARRL member and reside in the Ohio Section, update your mailing preferences to receive Ohio Section news in your inbox. Those residing outside the Ohio section will need to use the mailing list link above. Updating your ARRL profile will deliver news from the section where you reside (if the leadership chooses to use this method).
When logged in successfully, it will say “Hello <Name>” in place of the Login button where <Name> is your name. Click your Name. This will take you to the “My Account” page.
On the left hand side, under the “Communication” heading (second from the bottom), click Opt In/Out (or direct link)
To the right of the “Opt In/Out” heading, click Edit
Check the box next to “Division and Section News.” If it is already checked, you are already receiving the Ohio Section Journal.
Click Save
There should now be a green check mark next to “Division and Section News.” You’re all set!
THE TECHNICAL COORDINATOR
Jeff Kopcak – TC
k8jtk@arrl.net
Hey gang,
I went back and looked. It has been quite a while since I’ve ragged on Baofeng radios in the OSJ. If you’re a new ham or new reader, Baofeng radios sucked in terms of spectral efficiency. Like most things, the market is being flooded by cheap Chinese alternatives. The thought of a $30 radio (back then, the big A now has for $17 as of this writing) is very appealing to many hams. Whether due to price consciousness or that the radio can be trashed if it gets damaged. No one is going to lose sleep if it goes missing or gets destroyed.
The radio works pretty well. The battery lasts a long time on a charge. Audio reports were good. Sure, programming was a pain because the menu made little sense and two radios likely didn’t operate the same. Everybody and their brother was (and still is) saying how great Baofengs are.
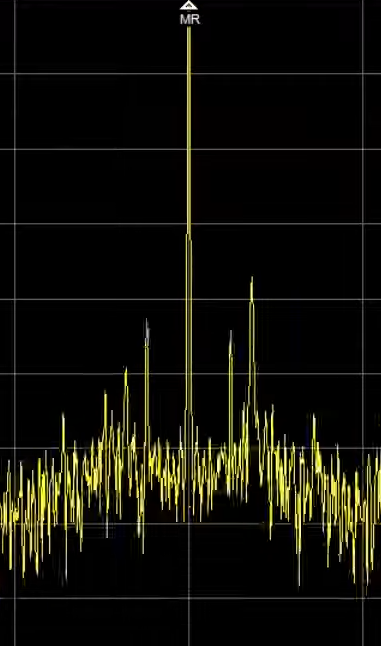
When the output of the transmitter was analyzed, they were not so great. Baofengs had this nasty habit of transmitting everywhere at once. They had spurious emissions up and down the RF spectrum which interferes with other licensed services. Part 97 specifies spurious emissions for radios must be 40 dB below the fundamental emission. Some videos show spurious emissions only -19 dBm from the fundamental. Clean spectrum and self-regulation be dammed but zOMG, $17!!!
I have not bought any more or transmitted using the ones I have since they gained their poor reputation for harmonics and emissions. Some YouTube videos I’ve seen recently say UV-5R RF performance is ‘better.’ I don’t believe it, but color me intrigued. Maybe they’ve finally cleaned up their act.
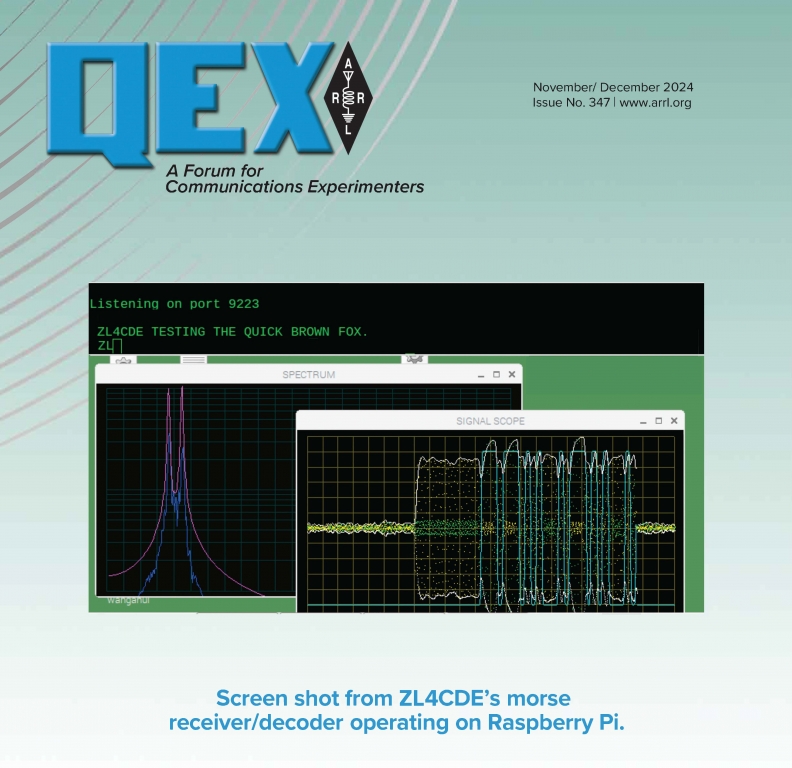
Baofeng UV-5R spectral analysis on 2m (w2aew)
Alan – W2AEW, Technical Coordinator for the Northern New Jersey section, has his own YouTube channel and it is fantastic. Very detailed videos on many technical topics including antenna building and tuning, using NanoVNAs, demos, tips, and electronic components. His latest video (as of this writing) analyzes the RF characteristics of a recent Baofeng UV-5R purchased about a year and a half ago.
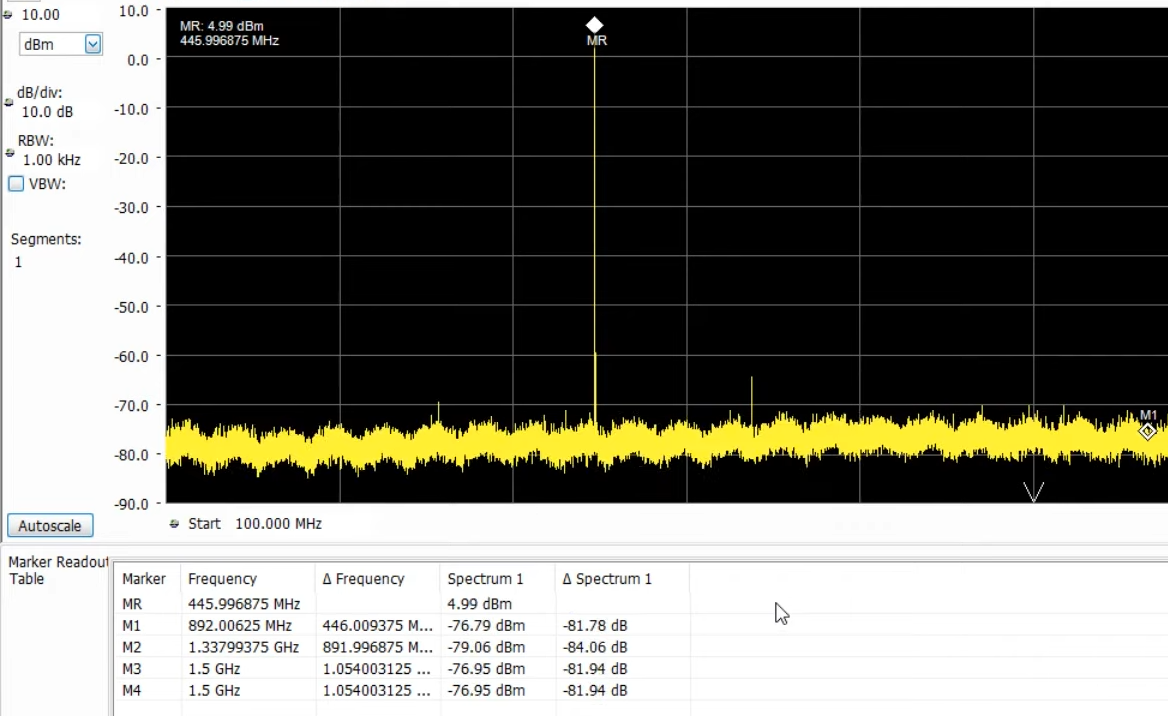
His video shows RF performance is actually compliant. On 2m, he shows the second harmonic is -60 dBm down. The third and remaining harmonics are all in the noise floor (-77 dBm or greater). On 440 shows the second and third harmonics in the noise floor. Much better than I expected. Alan goes on to do additional analysis. RF output vs time is clean. His radio stabilizes on the final output frequency cleanly within +/- 30ms. PL tone is stable and clean too.
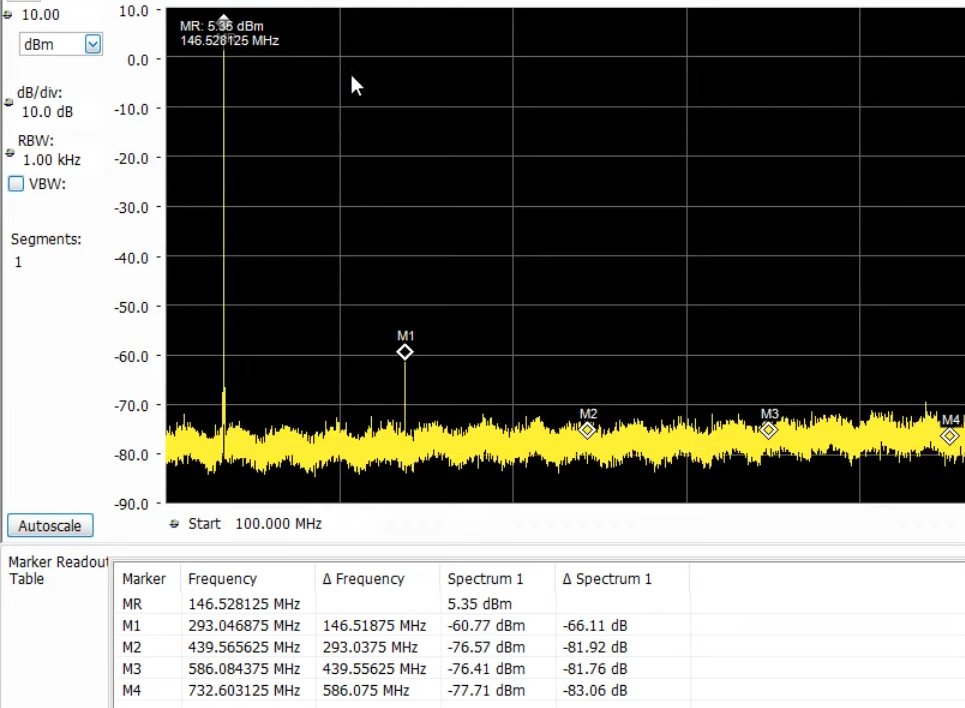
Baofeng UV-5R interesting spurs (w2aew)
Alan did find spurious sidebands 75 kHz away from the carrier, which is outside the passband of narrowband FM. He speculates there is a switching supply or regulator internal to the radio causing the wideband FM modulation.
Before everyone goes stockpiling UV-5Rs because of this news, this is a sample size of one radio. Maybe the radio Alan tested is one of the ‘good ones’ and the rest still stink. Don’t know. Other recent videos, where they put the radio on an analyzer, seem to indicate newer UV-5Rs are cleaner than previous generations. This result also does not mean ALL Baofeng models have clean RF output. A video by K8MRD shows the UV-5RM is as bad as the old UV-5Rs, in more ways than just RF performance.
Baofeng UV-5R spectral analysis on 440 (w2aew)
What radio should someone buy that definitely meets Part 97 RF requirements and doesn’t break the bank? DX Engineering has three dual-band HT options for under $100 at the moment: a Yaesu FT-4XR for $85, an Alinco DJ-VX50T for $90, and a Yaesu FT-65R for $99. I’m sure others can be found as part of Black Friday deals as well.
For something a little cheaper, a company called “Baofeng Tech,” or BTech, is a US based company offering the UV-5X3 for $65! They have comparable offerings to other Baofeng models too. Baofeng Tech not only sells improved Baofeng radios but they also directly support their products.
Baofeng Tech UV-5X3 radio and accessories (baofengtech.com)
The radio looks and acts like a UV-5R. Baofeng Tech updates the firmware, modifies the radio by installing better filtering on the transmitter, and includes an easy-to-read, nicely printed, 85-page manual. The UV-5X3 comes with the same accessories including belt clip, antennas, charger, and ear piece. All original Baofeng accessories work too. To my surprise, they even squeezed in the 220 MHz (1.25m) band into the radio making it a tri-band radio!
Baofeng Tech assured me their radios meet spectral requirements for Part 97. The one I picked up tested good on VHF and spot-on for UHF. I feel very comfortable transmitting with this radio knowing it is compliant. The CHIRP free programming software will program the UV-5X3. If you’re into the RT Systems programmers, the BTS-5X3 programmer is needed. The RT UV-5R programmer (BAO-5R) will not work with the UV-5X3. However, the same cable (USB-K4Y) is needed and will work on both radios.
The West Chester Amateur Radio Association – WC8VOA, was not able to hold their club meeting at the VOA faculty for November as construction projects are in full swing, including redoing the blacktop. Their original presenter for November didn’t want to present over Zoom so they were looking for a last-minute fill-in. I filled in giving my presentation on Ham radio VoIP (Voice over IP) modes and my system used for their weekly net. This presentation covers the history and current state of Internet linking systems in Ham Radio, both analog and digital. The second half covers my DVMIS system and how I link 13 Ham Radio VoIP systems together. Join WCARA’s weekly net Monday evenings at 8pm.
One of the responsibilities of the Technical Coordinator in the Ohio Section is to submit something for the Section Journal. The Section Journal covers Amateur Radio related things happening in and around the ARRL Ohio Section. It is published by the Section Manager Tom – WB8LCD and articles are submitted by cabinet members.
Once my article is published in the Journal, I will also make it available on my site with a link to the published edition.
You can receive the ARRL Ohio Section Newsletter and other Ohio Section news by joining the mailing list. Anyone can join and do not need to be a member of the ARRL, Ohio Section, or even a ham to join the mailing list. Please sign up! NOTE: If you do not see the Mailchimp “Subscribe to the ARRL Ohio Section Newsletter” signup form just below the page heading, disable cosmetic filtering in uBlock Origin or check browser plugins for similar blocking.
If you are an ARRL member and reside in the Ohio Section, update your mailing preferences to receive Ohio Section news in your inbox. Those residing outside the Ohio section will need to use the mailing list link above. Updating your ARRL profile will deliver news from the section where you reside (if the leadership chooses to use this method).
When logged in successfully, it will say “Hello <Name>” in place of the Login button where <Name> is your name. Click your Name. This will take you to the “My Account” page.
On the left hand side, under the “Communication” heading (second from the bottom), click Opt In/Out (or direct link)
To the right of the “Opt In/Out” heading, click Edit
Check the box next to “Division and Section News.” If it is already checked, you are already receiving the Ohio Section Journal.
Click Save
There should now be a green check mark next to “Division and Section News.” You’re all set!
THE TECHNICAL COORDINATOR
Jeff Kopcak – TC
k8jtk@arrl.net
Hey gang,
It’s been nearly ten years since I first registered an AllStar Link node and what a ride it has been. From political issues, to software and network forks, and license violations. Through all of it, I’ve been fascinated with the potential options and flexibility of Asterisk, a SMB (small/medium business) phone system, being turned into a multi-function amateur radio system. It suffered from a lack of the 3-T’s: time, talent, and treasure. Finding time to work on the project with all their other responsibilities. Talent – developers, system administrators, coordinators with good working knowledge of best-practices getting things up and running and sustaining that level of effort. Treasure – donations to help the open-source project with costs associated with running a network and improving integrations, upgrades. With the release of “ASL3,” AllStar Link has made a huge leap forward with help from one of Ohio’s Technical Specialists.
AllStar Link, often called AllStar or ASL, is an Amateur Radio linking system on a Linux computer running on top of the open-source PBX telephone switching platform called Asterisk. An AllStar module called app_rpt turns Asterisk into a powerful, full featured, Ham Radio repeater controller and linking package. It is theoretically capable of controlling hundreds of nodes at a time. Jim Dixon – WB6NIL (SK), developed app_rpt and is considered the father of AllStar.
Like other analog Voice over IP systems (VoIP), such as EchoLink or IRLP, AllStar Link links radio systems together. AllStar is flexible enough to link other infrastructures together as well. I, for example, have a connection to a VoIP phone provider. This allows the ability to add autopatch and reverse-autopatch to my node. For the younger hams, this is the ability to make phone calls from your radio when you don’t have cell phone coverage. Or don’t want a cell phone. It offers the ability to make emergency calls or issue node control commands over the phone. Though my node barely covers the block I live on, accomplishing this was more of a “can I do this?” exercise.
AllStar nodes can be:
Repeater: full duplex node and user functions accessed by DTMF or webpage (when given access)
Simplex node: “hotspot” half-duplex node, also with user functions available by DTMF
Remote Base node: a half-duplex, frequency agile HF, VHF, UHF remote base, or connected to a repeater controller. Will not respond to DTMF on the RF side of the remote link.
Radioless node: without any RF hardware. Uses a mic and headphones, speaker, or Bluetooth. Can also be a “Hub node,” a common connecting point (similar to Conference or Reflector) with plenty of Internet bandwidth to handle many connections at one time.
Nodes can be public, private, or a combination of both. A public node would be accessible by any other public node on the AllStar network. These nodes require Internet access to the AllStar network for the phonebook of other public nodes. Private nodes can be limited to select users or on a completely private network. Great for connecting repeaters at different sites over a mesh network, point-to-point link, limited bandwidth, VPN, or even over the public Internet.
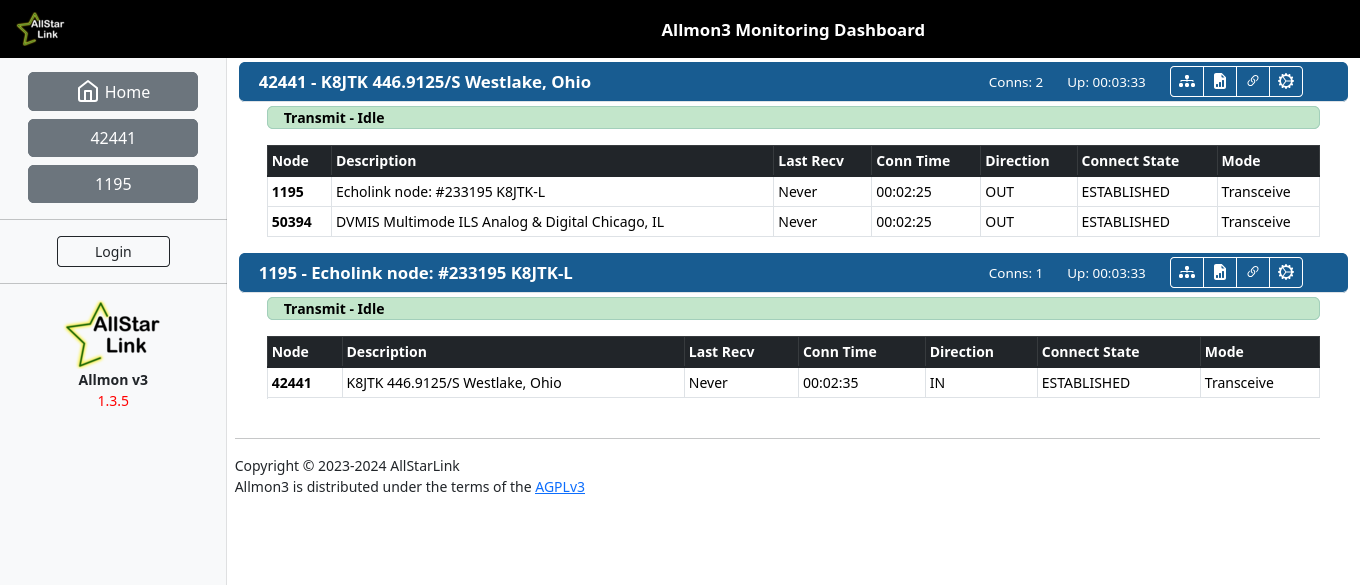
Allmon v3 running on AllStar Link node 42441
Getting AllStar Link to work on modern operating systems was painful especially if you couldn’t necessarily control the operating system, in the cloud for example. System design could have been better. The system that provides routing and mixing of audio streams between Asterisk and physical systems, DAHDI, always seemed to cause problems on newer Linux kernels and operating systems. The full list of AllStar public nodes is downloaded every 10 minutes by each and every node on the network.
This drove me nuts one evening. My home node, 42441, just came back online after being offline for a couple days. Having just booted the node, wanted to connect to a remote node, 2000 for example. It could take 10 to 15 minutes (on average) before that link could be established. 42441 needs to successfully register with the AllStar Link servers notifying them it is online. Once registered, both nodes (42441 & 2000) need to have downloaded the public node list and have each other’s information available before the two can connect. On average, this cycle took about 15 minutes. I had no idea this was a thing until I encountered this scenario.
Those are just a couple issues with legacy AllStar. Technical Specialist Jason – N8EI published news about AllStar Link version 3 being released in the August edition of the Ohio Section Journal. He decided to help the AllStar project by providing a newer, modern, web interface called Allmon v3. Jason became more involved as the project received a grant from ARDC, a programmer was hired, and a community of hams stepped up to support the project. These ARDC grants are a result of selling one-fourth of network 44.
Shortly after ASL v3 was released, my QTH node died. It appeared to be the Raspberry Pi itself because it can’t seem to boot from any SD card. I was running the downloaded Raspberry Pi ASL v2 image which was quite outdated. I kludged it together by manually compiling the latest ASL v2 code from GitHub. Armed with a replacement Pi, I started to look at the newly released version of ASL 3 and I am quite impressed with the modernization.
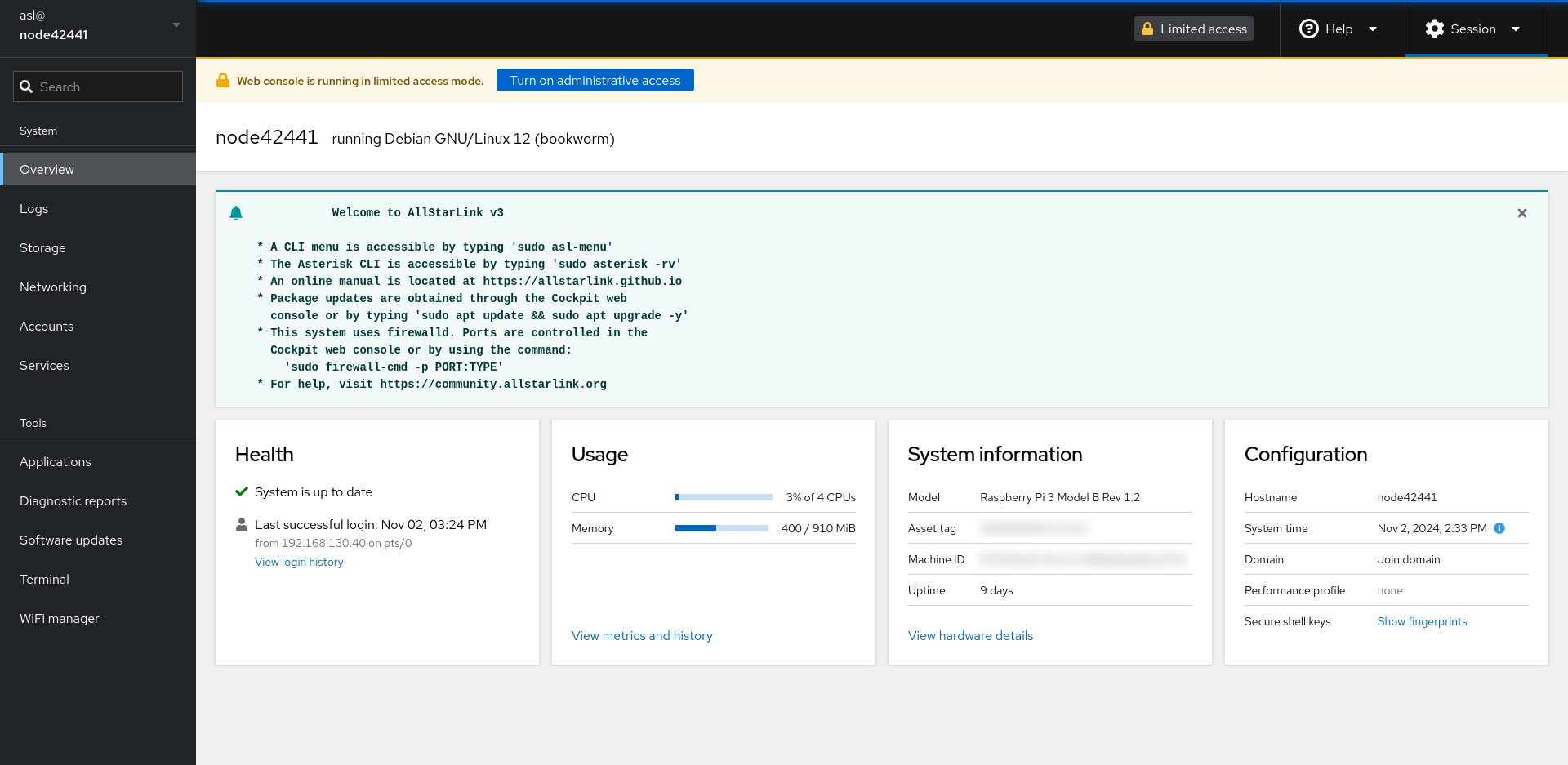
Version 3 improvements start with using the standard Raspberry Pi Imager allowing configuration of the image, including user name, time zone, and Wi-Fi settings, to be customized when written to the SD card. The base OS is Debian 12, a currently supported operating system. Asterisk was pushed from version 1.4 (released in 2006, end-of-life in 2012) to Asterisk 20.9.3. One new pre-installed app includes Cockpit, a web-based administration tool for Linux. Cockpit can view logs, configure network settings, update the system, and handle SSH sessions – all through the web browser. In addition, Asterisk no longer runs as root which increases security in case of compromise through Asterisk.
Configuration files from previous ASL versions cannot be restored because of changes in upgrading to version 20. One reason is 16 years of Asterisk and changes in that time. I document all my node config changes which made it easier to identify changes needed when merging them into the new configuration. It wasn’t quick but what migration is? Another change is node lookup can now use DNS which affords instant connections for recently powered on nodes. No more waiting before links can be established.
Node configuration is largely done through asl-menu, though, obviously, specific owner configurations need to be added manually. app_rpt supports templates. This means node configs can import a template with common settings. Specific settings can be overridden from the template by setting these values at the node level. This is useful for devices with two or more nodes having the same or similar configuration settings, such as a hub node. This drastically cuts down on the lines needed in rpt.conf, file size, and sanity of finding where you are making changes in a large configuration.
Cockpit on AllStar 3 node 42441
Documentation notes the EchoLink module has been rewritten for stability and now include features such as chat, timeout timer, and doubling prevention. I’ve used the EchoLink module but haven’t checked for issues I knew existed previously verifying they’ve been resolved.
All these changes are welcome. I’m finding lingering issues and edge cases. To the project’s credit, they have been diligently working out issues, resolving them in short order, and pushing out frequent updates – faster than any previous version of ASL.
Some of the autopatch issues have been resolved, though my configuration still requires quiet = 1 be added to the autopatch string because some autopatch bugs with half-duplex nodes remain. I also can’t get autopatch working with my provider, voip.ms, using SIP. This was an issue in previous versions too. I’m not sure where the issue lies but the provider recommended configuration is SIP. I can only get IAX to work. I’m not spending a lot of time tracking this down because I don’t see others having the same issue and don’t ever really expect autopatch to be used on my node.
Tuning menu options don’t include rxsquelchdelay or rxaudiodelay for squelch tail elimination in USB Radio. This is being added. I still have to manually add invertptt = no for my URIx and radio configuration, also not present in the tuning menu. This option exists in Simple USB but not USB Radio tuning menus.
Kudos to Jason and the rest of the AllStar Link team for the monumental work that’s been done to modernize the project and the work they continue to do. I’ll reiterate Jason’s pitch for support. Support the project through using ASL and reporting issues. Download the Raspberry Pi image or add the package repo to install ASL on a server or Virtual Machine. Supporting the project financially by donating keeps the system running and supports future improvements.
One of the responsibilities of the Technical Coordinator in the Ohio Section is to submit something for the Section Journal. The Section Journal covers Amateur Radio related things happening in and around the ARRL Ohio Section. It is published by the Section Manager Tom – WB8LCD and articles are submitted by cabinet members.
Once my article is published in the Journal, I will also make it available on my site with a link to the published edition.
You can receive the ARRL Ohio Section Newsletter and other Ohio Section news by joining the mailing list. Anyone can join and do not need to be a member of the ARRL, Ohio Section, or even a ham to join the mailing list. Please sign up! NOTE: If you do not see the Mailchimp “Subscribe to the ARRL Ohio Section Newsletter” signup form just below the page heading, disable cosmetic filtering in uBlock Origin or check browser plugins for similar blocking.
If you are an ARRL member and reside in the Ohio Section, update your mailing preferences to receive Ohio Section news in your inbox. Those residing outside the Ohio section will need to use the mailing list link above. Updating your ARRL profile will deliver news from the section where you reside (if the leadership chooses to use this method).
When logged in successfully, it will say “Hello <Name>” in place of the Login button where <Name> is your name. Click your Name. This will take you to the “My Account” page.
On the left hand side, under the “Communication” heading (second from the bottom), click Opt In/Out (or direct link)
To the right of the “Opt In/Out” heading, click Edit
Check the box next to “Division and Section News.” If it is already checked, you are already receiving the Ohio Section Journal.
Click Save
There should now be a green check mark next to “Division and Section News.” You’re all set!
THE TECHNICAL COORDINATOR
Jeff Kopcak – TC
k8jtk@arrl.net
Hey gang,
Tech companies can’t seem to figure out how to make money on perpetual licenses. Shareholders still want a return on their investment and those companies remain full steam ahead on subscriptions. In a rough economy, companies are refocusing limited resources on efforts that will make money versus directly improving offerings available for free or nearly free.
CentOS was a community developed and supported enterprise operating system forked from Red Hat Enterprise Linux (RHEL) in 2004. Similar to Fedora, CentOS was an upstream source to Red Hat but without licensing fees. An upstream source means features are available in lower Linux operating system distributions first, then picked up by ones like Red Hat Enterprise Linux. This method offers more stability as features would have been deployed on and issues fixed with a significant number installs in a community-based operating system before being added to an enterprise class operating system.
In Ham Radio, the IRLP project used various versions of Red Hat including Fedora Core and CentOS most recently. CentOS, at the end of 2020, announced the distribution would be discontinued to focus on CentOS Stream. The community’s response was overwhelmingly negative. Many enterprise systems were based on CentOS to avoid licensing and subscription fees now prevalent in Red Hat Enterprise Linux (though individuals can obtain a development subscription at no-cost). IRLP moved to another known stable distribution, Debian.
Rocky Linux (rockylinux.org)
What’s the difference between CentOS and CentOS Steam? I’m still not quite sure. The Wikipedia article on the 5-year-old operating system doesn’t say much other than it’s a “midstream” between Fedora and Red Hat. That’s what the original CentOS distro basically was. Midstream isn’t an officially recognized term referring to flow of packages and features. My searching of the term kept bring up the oil and gas industry. I did find Stream being noted as a “rolling release” operating system in an old Wiki entry now on Archive.org.
A rolling release operating system is continually updated compared to fixed versions or release cycles. This is similar to how Microsoft is updating their Windows 10 and later “operating system as a service” platform with ongoing release updates. These are the numbered versions “YYMM,” later the “YYH1” and “YYH2” versions. No enterprise appliances I’m responsible for migrated to Stream. They all went to Red Hat.
One of the CentOS founders, Gregory Kurtzer, shortly after the announcement of development termination, launched a successor to CentOS called Rocky Linux. I like their “about” line on their website: Rocky Linux is an open-source enterprise operating system designed to be 100% bug-for-bug compatible with Red Hat Enterprise Linux®. An operating system touting their bugs. Didn’t see that one coming. Not that I’ve been looking for bugs, but I’ve been using Rocky as a way to test application deployment and configurations before I break our QA environments and need the VM (virtual machine) team to redeploy the Red Hat appliance.
AlmaLinux (almalinux.org)
Another alternative is AlmaLinux. Both Alma and Rocky are binary-compatible releases for Red Hat providing freely available production-grade enterprise operating systems. “The Rocky Enterprise Software Foundation (RESF) has been created to organize a community around enterprise, research, academia, individuals, and other institutions to collaborate on building and maintaining the open source tools that these organizations need.” AlmaLinux OS Foundation is a 501(c)(6) non-profit. The 501(c)(6) non-profit classifications are business leagues, chambers of commerce, and real estate boards.
In another subscription move (and major sh- show), Broadcom purchased VMware. VMware, known for its virtualization technology, is also largely used in the enterprise. Though a free, but limited, tier was available for those whom prefer it as their virtualization platform at home.
Virtualization allows multiple operating systems, instances, and containers of different operating systems and applications to be virtualized and run on the same physical machine. Physical machine specifications are often beefier with more CPU, RAM, and storage but allow those to be carved off for applications that need only a fraction of those resources. Those applications could be remote access, network controller, monitoring, web servers, personal storage, media, mail, databases, etc. All run on the same physical hardware but do not affect other virtual machines or other applications running on the same hardware.
Broadcom re-positioned the VMWare brand and its products to the largest businesses through rapid transitions to subscriptions and outrageous subscription pricing. In addition to high-cost subscriptions, they are no longer issuing or honoring perpetual licenses previously purchased by businesses.
Perpetual licenses are licenses obtained by making a one-time purchase upfront and are valid indefinitely. In contrast, fees are collected the entire time you want to continue using a service, often yearly, for a subscription. This is also a way to control – vendor doesn’t want to offer or maintain a product anymore or subscriber takes a position the vendor doesn’t agree with: subscription terminated.
Though, at the end of May, Broadcom reversed course announcing VMware Workstation Pro and VMware Fusion Pro are available for free personal use once again. Being a favorite of self-hosting and homelabbers, including hams, many use VMware at the core of their server and virtualization needs. A Homelab is running a server (or multiple) in the home, hosting several applications and/or used for testing applications.
Proxmox Cluster (proxmox.com)
If you’re (still) looking to move off VMware or just looking for a virtualization platform, like everything else, there are options. Proxmox Virtual Environment or XCP-NG are Free and Open-Source alternatives. I have been using Proxmox for over three years and haven’t looked back. At first, I needed tutorials for attaching network attached storage shares and how to setup VLANs in the GUI. It’s been a breeze after that. I’ve been impressed how easy it is to do backup & restores and snapshots for easy rollback of changes. Often, I’ll take a backup from one instance and deploy it on another instance for testing or upgrades.
I haven’t used XCP-NG but know it is a fork of Citrix XenZerver, which maybe familiar to those whom have worked on Citrix systems. The interface is modern looking and a favorite of Tom Lawrence of Lawrence Systems. Tom puts out a ton of excellent tutorial and review videos on his YouTube channel. Most of this content also apply to homelabbers.
Arguments are made that subscriptions work better for business and not so for individual consumers. However, consumers seem to favor subscriptions on music, video, and gaming services – not when it comes to software platforms and operating systems.
There have been rumblings of Microsoft turning Windows into a subscription-based operating system. Microsoft keeps pushing things to the cloud while companies are starting to shift back to on premise. I think a Windows OS subscription is sustainable for businesses but not for consumers. Consumers still think the OS is free – just look at the amount of advertising in consumer versions.
Lastly, in an evolving story, Microsoft wants to use their AI (artificial intelligence), called Copilot, to create a searchable history of everything done on a Windows computer, dubbed Windows Recall. Great, another attack and spying vector. It’s not like Microsoft has the best security track record. Windows Recall was intended to be turned on by default. However, after consumer and privacy advocates pushed back, MS re-engineered this feature to be opt-in with better data protection and access controls or it can simply be removed. Still creepy.
One of the responsibilities of the Technical Coordinator in the Ohio Section is to submit something for the Section Journal. The Section Journal covers Amateur Radio related things happening in and around the ARRL Ohio Section. It is published by the Section Manager Tom – WB8LCD and articles are submitted by cabinet members.
Once my article is published in the Journal, I will also make it available on my site with a link to the published edition.
You can receive the ARRL Ohio Section Newsletter and other Ohio Section news by joining the mailing list. Anyone can join and do not need to be a member of the ARRL, Ohio Section, or even a ham to join the mailing list. Please sign up! NOTE: If you do not see the Mailchimp “Subscribe to the ARRL Ohio Section Newsletter” signup form just below the page heading, disable cosmetic filtering in uBlock Origin or check browser plugins for similar blocking.
If you are an ARRL member and reside in the Ohio Section, update your mailing preferences to receive Ohio Section news in your inbox. Those residing outside the Ohio section will need to use the mailing list link above. Updating your ARRL profile will deliver news from the section where you reside (if the leadership chooses to use this method).
When logged in successfully, it will say “Hello <Name>” in place of the Login button where <Name> is your name. Click your Name. This will take you to the “My Account” page.
On the left hand side, under the “Communication” heading (second from the bottom), click Opt In/Out
To the right of the “Opt In/Out” heading, click Edit
Check the box next to “Division and Section News.” If it is already checked, you are already receiving the Ohio Section Journal.
Click Save
There should now be a green check mark next to “Division and Section News.” You’re all set!
THE TECHNICAL COORDINATOR
Jeff Kopcak – TC
k8jtk@arrl.net
Hey gang,
Despite the severe weather briefings for August 5th in northern Ohio showing a slight risk of severe storms throughout the area, didn’t have storms near me. The August 6th briefing was shaping up about the same. Though there was a chance of tornadoes, it was under 10%.
On an otherwise bright, sunny, and warm day, I left work ordering food to be picked up 30 minutes later on the way home. As I was driving home, with the windows open, on I-90 to the west side of Cleveland, a tornado warning had been issued. As I approached my exit, a stark contrast to the current sunny conditions, I was facing a blackened sky looking west. “Oh, this isn’t going to be good” I thought. Hoping it was far enough away that I could pick up my pizza and make it home before the storm hit.
After getting off at my exit, still a half-mile away from the pizza shop, I was stopped at the intersection of Hilliard and Canterbury near my house. The wall of rain hit just about 3:52pm. Hurrying to pick up my food, quickly running in an out, I was drenched. In the 3, to maybe 5, minutes I was on Hilliard, picked up my pizza, and made it back to that same intersection, a large tree had come down across Hilliard Blvd.
Tree down on Hilliard Blvd at Canterbury Road (Westlake, Ohio – taken 8/9/24)
Not only was there debris from trees and branches being blown around all over the place, trash and trash buckets were being blown around too as some residents had already put their trash out to the curb in anticipation of pickup the next day. I made it safely home as I only had to travel a block and a half. The intense part of the storm blew through in less than 15 minutes. Staying in my car, the worst had yet to be discovered. As I made my way from the car into the house, I discovered many large tree branches had come down in my backyard.
After storm, before cleanupAfter cleanup
My wire HF antenna was about 100 feet long strung between two trees across the backyard. I figured it was a goner. Maybe the branches were far enough in the back of the yard that it somehow missed it. Even if it was brought down, wouldn’t be the first storm where I’ve had to replace my antenna. I didn’t get lucky twice in one storm. Without going to survey the damage just yet, I could see pieces of wire dangling so I knew it was not in one piece anymore.
A little while later going out to look, the fence post used to connect the coax feedline to the antenna feed point was snapped off at ground level, brought down by a tree branch coming off a neighbor’s tree. Landing perfectly on the post like those branches were placed there. Don’t know if my antenna was ripped down by the fence post being destroyed or from being in-path of a large tree branch flung across the yard, which would have been no match for a wire antenna. Between trees in my yard and the neighbors, there were 4 to 6 large branches sheared off from the upper parts of 70′ trees.
RIP feedline and antennaBranches sheared off
Luckily, no damage to any other property and no one was injured or worse. Damage to my HF antenna and setup is extensive. The post would need to be dug up and replaced, the entire run of coax from the shack replaced, and a portion of the PVC housing needs to be replaced. There was also some electrical in a separate run out to the post. Dad (SK) and I worked to install all of this about a decade ago over a summer. To make matters worse, I may lose my antenna supports as at least one tree is severely damaged and need to be assessed.
In my completely amateur observation, seems like straight line winds, if nothing else. There weren’t any branches twisted off trees so I don’t think it was a tornado. In the coming days, many in the area had trees removed and debris cleared.
My street had power throughout but the opposite side of the block was without until the weekend. By night time, it was obvious many did not have power because there was a hum of generators running in the distance. That area lost power due to the tree that fell where I was minutes earlier and other significant damage not far away.
Reports released by the National Weather Service office in Cleveland on the August 6, 2024 storms show one tornado dissipating a half-mile from my house. Would it have kept going, it would have passed over my house and probably a contributing factor to the damage in my yard, others on the street, and damage seen on Hilliard. A second tornado kept along the shoreline but came within a mile and a half of the QTH. There is a quite impressive video from a beach cam in Vermilion showing the approaching storm and fury as it makes landfall.
The shack itself was not damaged by the storm, though it has been on my to-do list to replace. Not sure when I’ll be able to rebuild but will be off the air indefinitely.
Damage on Hilliard Blvd, east of Columbia Rd (Westlake, Ohio – taken 8/9/24)Damage on Hilliard Blvd, east of Columbia Rd (Westlake, Ohio – taken 8/9/24)Damage on Hilliard Blvd, east of Columbia Rd (Westlake, Ohio – taken 8/9/24)Damage on Hilliard Blvd, east of Columbia Rd (Westlake, Ohio – taken 8/9/24)
As posted on the ARRL website and highlighted in my June article, the ARRL fell victim to a ransomware attack in May. It was revealed the payout was a $1 million ransom. Well, not so much the ARRL but their insurance paid out. Initial asking was a multi-million-dollar ransom. Since the ransom holders did not have access to any significant compromising data, it was reduced to $1 mill.
It has been stated the ARRL does not collect any data that’s not already public (largely data the FCC has on file for our licenses) information on its members, we’re not at risk in this compromise. However, the article notes, employees of the ARRL may have had their private data leaked (such as social security numbers) in records kept as part of employment.
For all the benefits pitched to get companies ‘moving to the cloud’ and using ‘AI,’ not the least of which include user credential protection – knowing when bad guys are attempting to gain access using employee credentials to compromise systems – and malware protection for cloud services and endpoints. It is good knowing those protections stopped and prevented the spread of malware. Wait, what… the ARRL’s cloud systems were compromised too? Well, that worked out well. These features are smoke and mirrors and provide little to no actual protection.
One of the responsibilities of the Technical Coordinator in the Ohio Section is to submit something for the Section Journal. The Section Journal covers Amateur Radio related things happening in and around the ARRL Ohio Section. It is published by the Section Manager Tom – WB8LCD and articles are submitted by cabinet members.
Once my article is published in the Journal, I will also make it available on my site with a link to the published edition.
You can receive the Journal and other Ohio Section news by joining the mailing list Tom has setup. You do not need to be a member of the ARRL, Ohio Section, or even a ham to join the mailing list. Please sign up!
If you are an ARRL member and reside in the Ohio Section, update your mailing preferences to receive Ohio Section news in your inbox. Those residing outside the Ohio section will need to use the mailing list link above. Updating your ARRL profile will deliver news from the section where you reside (if the leadership chooses to use this method).
When logged in successfully, it will say “Hello <Name>” in place of the Login button where <Name> is your name. Click your Name. This will take you to the “My Account” page.
On the left hand side, under the “Communication” heading (second from the bottom), click Opt In/Out
To the right of the “Opt In/Out” heading, click Edit
Check the box next to “Division and Section News.” If it is already checked, you are already receiving the Ohio Section Journal.
Click Save
There should now be a green check mark next to “Division and Section News.” You’re all set!
THE TECHNICAL COORDINATOR
Jeff Kopcak – TC
k8jtk@arrl.net
Hey gang,
As if I needed another reason to talk about computers in here. Our Great Lakes Division Director, Scott – N8SY, informed me that ARRL HQ added items to the Technical Specialists responsibilities. In particular, ones beneficial to clubs needing direction with their website, E-mail, and storage. The new responsibilities are to:
3. Serve as an advisor to local clubs on web design and maintenance. 4. Serve as an advisor to clubs on web storage and email.
Many in the section’s technical crew have the knowledge or already do these things for their own club. Some ideas for storage and E-mail would be things like: how do we share files, collaborate and coordinate projects and activities. Next year’s Field Day perhaps? Maybe a way to keep in touch with the membership – such as a mailing list or Google Groups. Maybe the previous person responsible for these activities abandoned it, moved away, or otherwise left the club. We can work with and advise another member on ideas to revive that activity.
A solution many might be familiar with and use at work, SharePoint, is not something available to clubs for free or nearly free. There are Development (DEV) tenants for free but have limited lifetime and functionality. A solution such as groups.io has nearly all the features of a SharePoint site (up to 100 members for free) and not nearly as bulky. A club might decide to “roll their own” – self hosting services while retaining full control of their data – at a provider already available to the club.
Web sites can be beneficial to clubs. They are often the first interaction with potential new members and they keep existing members updated with the latest happenings, activities, and repeater information. A site with outdated information can leave potential members seeking a club that pays more attention to those details. With Content Management Systems (CMS), it’s easier than ever to build and maintain a website.
Responsive website automatically adjusts to different screen sizes and viewports (W3Schools)
According to BuiltWith, WordPress accounts for 44% of the 77.5 million sites running a CMS and Wix is second at 10.5%. Choosing a CMS has become a popular option because little to no coding is required. Hosting providers offer easy one-click installation solutions, too. One can easily make a site with WordPress by inputting some information and selecting a good template to display information in an attractive manner.
Get in touch with myself or one of the Technical Specialists to advise a club on any of these areas.
Previous look of the Wood County Amateur Radio Club site with left navigation on a mobile device
Personally, I use WordPress for my personal site and HamNationDSTAR.net – which I still maintain though no longer involved with the show.
Back in my day, I learned to use FrontPage to maintain websites. Though, schools were showing how to “build” web pages, and doing so, by exporting pages through Word. After taking a college class on HTML & CSS and working professionally as a programmer, I eventually realized the quality of code generated by that company’s products was (and still is) an abomination and entirely too bloated.
The Wood County Amateur Radio Club site started out as and remains my project to keep my web page skills going. It was first a FrontPage site. Then about 2008-2009, I rewrote the entire website by hand. To use buzzwords: “I optimized code.” Took out things that were generally being frowned upon in web design. The navigation pane and content pages were two iframes (pages within a page). Landing directly on a content page would not display the navigation iframe. As a workaround, I redirected the visitor to the homepage, which then loaded everything.
However, portable devices became much more popular. While WCARC pages would still work on smaller screens, it did require a lot of pinch-and-zooming because the navigation was static on the left side of the page. I knew about “responsive” websites because WordPress and other CMS’ I’ve used automatically render differently depending on screen size (phone, tablet, computer screen, TV, etc.) and orientation (vertical vs horizontal). I finally had some time to dig in around the beginning of this year.
When I rewrote the site the first time in ’08-09, I converted the site to use CSS (Cascading Style Sheets, a way to stylize and display elements within a web page). That saved a lot of time making the site responsive. If I wanted to make a different font selection or choose a different default size, that change is made in one place – while not having to edit a bunch of files/pages individually. With some exceptions for one-off style differences, all the styles are defined in the CSS.
I started out, as I often do, at W3Schools. They have a ton of how-to’s for different programming languages and real-time-editors to see modifications. The How TO – Responsive Top Navigation got things in motion. I took their idea and added my own touches to it. I changed the coloring to match the previous navigation, showing different colors to indicate when an item is hovered over and the current page the visitor is on. Then added icons to beautify the menu items. A camera for pictures, newspaper for the newsletter, people for meetings, and so on. The club has a Facebook presence and kept an “f” logo present in the navigation as well.
New look of the Wood County Amateur Radio Club site with collapsed navigation bar on a mobile device
A program that helped me render pages on my portable devices is called Cx File Explorer. My phone and tablet are Android devices. Using that app, I could save the file to my Network Attached Storage (NAS), then refresh Firefox or Brave browser on the Android device and see my changes instantly. I did not have to continuously upload the file a remote web server, for example. Cx creates a local web server on the device to serve up files as web pages to browsers on the device.
After the navigation changes were completed, moved on to sizing elements differently based on screen size and screen orientation. Font size on the header was too big when the navigation bar collapsed. I added font size changes for the header when the navigation bar is collapsed.
I wanted a way to have multiple elements that were spread out on a large computer screen to automatically display vertically when viewed on a mobile. On the home page, for example, these are the radar image, current time, solar activity and propagation near the bottom. On a computer screen, they are one next to the other, spread out horizontally. On a mobile, they stack themselves vertically such that they are one on top of the other.
The club calendar on the home page caused me the most grief. I like the monthly layout to note when events are happening and I want event titles to be seen. After many hours were spent futzing trying to get a one-size-fits-all, I couldn’t. The calendar size on a larger screen would not render well on a mobile device and vice-versa.
After fighting with the calendar for quite some time, came across an old post that gave me ideas. Have the monthly calendar displayed on larger screens and agenda view on a mobile screens. My prayers had been answered! That was the idea I needed.
Google Calendars offer different views (week, month, agenda) when embedded into a web page. Their helper generates different code based on the chosen options. That post gave me the idea to display the monthly view and hide agenda view on larger screens. Hide monthly view and display agenda view on smaller screens. Voilà.
After some weeks working on all the changes, I uploaded them and made them live. They’ve been running for about six months. The Wood County ARC site will render on a screen size as small as 450 pixels wide and renders to a max size of 3000 pixels wide and, of course, everything in between. Many people have thanked me for making the WCARC site work quite well and not crash their computer – meaning it doesn’t load an ungodly number of external resources and useless plugins. The site loads very little from external sources and most things needed to render pages are hosted on the Wood County Amateur Radio Club server itself.
One of the responsibilities of the Technical Coordinator in the Ohio Section is to submit something for the Section Journal. The Section Journal covers Amateur Radio related things happening in and around the ARRL Ohio Section. It is published by the Section Manager Tom – WB8LCD and articles are submitted by cabinet members.
Once my article is published in the Journal, I will also make it available on my site with a link to the published edition.
You can receive the Journal and other Ohio Section news by joining the mailing list Tom has setup. You do not need to be a member of the ARRL, Ohio Section, or even a ham to join the mailing list. Please sign up!
If you are an ARRL member and reside in the Ohio Section, update your mailing preferences to receive Ohio Section news in your inbox. Those residing outside the Ohio section will need to use the mailing list link above. Updating your ARRL profile will deliver news from the section where you reside (if the leadership chooses to use this method).
When logged in successfully, it will say “Hello <Name>” in place of the Login button where <Name> is your name. Click your Name. This will take you to the “My Account” page.
On the left hand side, under the “Communication” heading (second from the bottom), click Opt In/Out
To the right of the “Opt In/Out” heading, click Edit
Check the box next to “Division and Section News.” If it is already checked, you are already receiving the Ohio Section Journal.
Click Save
There should now be a green check mark next to “Division and Section News.” You’re all set!
THE TECHNICAL COORDINATOR
Jeff Kopcak – TC
k8jtk@arrl.net
Hey gang,
As Technical Coordinator for the Ohio Section, I oversee the section’s Technical Specialists. We are here to promote technical advances and the experimentation side of the hobby by encouraging amateurs in the section to share their technical achievements in QST, at club meetings, in club newsletters, and at hamfests and conventions. We are available to assist program committees in finding or providing suitable programs for local club meetings, ARRL hamfests, and conventions within the section. When called upon, serve as advisors for RFI issues and work with ARRL officials and other appointees providing technical advice.
Technical Specialists are a cadre of qualified and competent individuals here for the “advancement of the radio art,” a profound obligation incurred under the rules of the FCC. TS’s support myself and the section in two main areas of responsibility: Radio Frequency Interference (RFI) and technical information. They can specialize in one or more areas or be generalists with knowledge in many areas. Responsibilities range from serving as consultants or advisors to local hams or speaking at local club meetings on popular topics. In the Ohio Section, there are 12 qualified specialists.
RFI and EMI (electromagnetic interference) includes harmful interference that seriously degrades, obstructs, or repeatedly interrupts a radio communication service such as ham radio or public service agencies. RFI sources range from bad power insulators, industrial control systems, nearby or poorly made transmitters, household appliances, personal devices like computers, monitors, printers, game consoles – to grow lights, failing or poorly made transformers, and devices hams brag about getting cheap from China. Technical Specialists can offer advice to help track down interference or locate bozo stations when called upon. Technical information is wide-ranging, everything from antennas to Zumspots.
How can we help? The knowledge and abilities of YOUR Technical Specialists are really quite impressive:
Amplifiers
Antennas (fixed, portable, emergency operation)
Antenna systems such as towers, guying, coax/feedlines, and baluns
Boat anchors (tube technology)
Computer systems – Windows, Linux, Raspberry Pi
Digital voice and data modes – including D-STAR, DMR, Fusion, NXDN, P25, APRS, IGates, packet, TNCs, MT63, FT8/4, Olivia, PSK, etc.
Direction finding
Electronics and circuits, including teachers whom have taught electronics classes
Former repair technicians
Home brew
Internet linking (Voice over IP, aka VoIP) – Echolink, AllStar/HamVoIP, DVSwitch, PBX/Asterisk
Mobile installations – HF, VHF/UHF, antennas
Narrow Band Emergency Messaging System (NBEMS) – Fldigi and Flmsg
Networking – AMPRNet, routers, port forwarding, ISPs, firewalls, mesh, microwave
Power supplies
Propagation
Repeaters, controllers, and high-profile systems
RFI caused by power lines and consumer appliances
RF safety
SHARES stations (SHAred RESources – Department of Homeland Security HF radio program)
Software Defined Radios (SDR)
Tower safety
Professional certifications such as Motorola Certified Technicians, Master Electrician, Certified Journeyman Electronics Technician, General Radiotelephone Operator License (GROL), ETA certifications, Society of Broadcast Engineers (SBE) certifications and affiliations, and Marine Radio Operator permit holders.
This impressive list of qualifications are available resources to all in the Ohio Section. Looking for guidance in one of these areas? Need a program for your club meeting? How about a technical talk or forum at a hamfest? Assistance or direction on a project? My contact info is near my picture and on the arrl-ohio.org website. I’ll assist getting you in touch with an appropriate Technical Specialist.
Hamvetion Recap
Original 1964 Collins Communication Van at Hamvention
Another Hamvention has come and gone. This was emotional because this was the first since my dad passed, N8ETP. Hamvention was something we did together. He didn’t go last year because (we didn’t know it at the time) he was suffering from post-operation complications. He was looking out from above because I had no shortage of company on this trip. I checked into the hotel, then went to dinner. Immediately met a father and son on their first trip to Hamvention. We talked about the show, past shows, what to expect, and some pro tips. Ironically, the dad was released from the hospital a week prior after recovering from an infection. If they’re reading, I apologize I don’t remember your calls – send me a message and I’ll add them later.
Figuring the rain would keep attendees away Friday morning, traffic was worse than anticipated. Busses were stuck in with those trying to get into on-site parking, causing delays and lines at the high school. It took over an hour from the high school until I got into the fairgrounds. Broke out the poncho for the first time in a number of years.
After being admitted, checked in with the ARRL Ohio Section/Great Lakes Division table to say howdy to our leadership and swap stories. Shortly after leaving the booth, ran into George – W5JDX and Mike – VE3MIC from AmateurLogic.TV and spent the rest of the day hanging out with those guys. Due to rain, George didn’t do any recording until after we grabbed some lunch. Hilarity insured behind the camera as well as in front.
I left about 4pm to get ready for dinner. At dinner, I ran into George again. We were chatting and before we knew it, realized it was 8pm. We had intended on going to the D-STAR evening gathering but didn’t make it since we were having a big time.
Saturday, ran into Mike – this time in the flea market – and we walked a good portion of it in the morning. Mike and cousin Jerry were going to head back home around noon. I walked the rest of the flea market because that was something dad liked to do too. Before leaving, talked with some inside vendors I wanted to speak to.
Inside the Collins Communication Van
Shopping list was sparse this year. Only thing I was really looking out for was a place that built ham shacks/outdoor buildings. The camper converted into my existing hamshack really needs to be replaced. I didn’t see any builders there. Rest of the shopping list was “nice to haves” – radio with a TNC for APRS or Winlink. Maybe other APRS gear. Couple Motorola pieces of equipment I’ve been looking for. Been wanting to get a D-STAR radio with the latest features. I took advantage of a show special at DX Engineering and picked up an ICOM ID-52, mainly because the restrictions (by ICOM) were lifted on the show specials.
A ham in the area, whom I’ve gotten to know, was looking to unload some of his gear. I picked up a used ICOM IC-746Pro and Micro Keyer. Fortunately, I was able to try out the radio before I bought it. Doing some research online found out the most common problems with the 746 are the display backlight goes flaky, eventually crapps out, and a dead transmitter. Both were non-issues.
This ham did say the tuning knob might be loose. It didn’t seem much different than my IC-7000. Upon using it at home, there might be an issue with the knob because it does repeat the same frequency numbers over and over again on occasion. I’ll look into tightening or cleaning the knob/encoder to see if that resolves it. It’s not a big deal because most of my operation is digital and I use remote control through a CI-V cable.
Otherwise, it’s been working fine on Winlink. There are a couple differences I like in my 7000 over the 746. Main one being it keeps switching back to USB from D-USB for digital operation. Functionally, it’s working as expected.
A stop at Micro Center in Columbus on the trip back home is required for some post-Hamvention spending. The Columbus location is a bigger store than my closest location on the east side of Cleveland (Mayfield Heights), which means they have more stuff out on display. I needed some larger capacity USB Flash Drives and they had a Lenovo ThinkPad on sale. I’d been having trouble with my existing laptop failing to charge the battery. I found out the Columbus store is a larger location because it is the flagship store for Micro Center as their headquarters are about 15 minutes away. That store will have items not (yet) available at other locations as a test to see if an item sells out.
The same general themes kept popping up before the show and at the show from other attendees: ‘this maybe [my] last one’ and ‘show specials can be found online.’ With the economy in the crapper and inflation in its current state, it’s getting even more expensive to attend Hamvention. $500 and up for a single room in the area for the weekend. With other local events, such as grade school sporting tournaments and antique flea markets, hotel rates are higher due to demand. There were a couple issues at my hotel too. While the staff tried to make it right offering bonus points, the issues still shouldn’t have happened when you’re paying that much for a room. An inconvenience for what was supposed to be an otherwise enjoyable time.
Hamvention show specials, for the most part, can be found online too. Not all distributors bring a lot of gear (inventory) to sell – except for maybe the most popular radios and models. Heil Sound is one vendor most people I know reference because we were involved with Ham Nation. Back at Hara Arena, they had an entire side of Audio Alley with equipment and inventory for sale. Heil Sound had a 6-foot table this year showcasing headset and some microphone offerings. They, like many others, are relying on distributors for show specials and handling of inventory – which goes back to the show specials are also found online. MFJ wasn’t there because they ceased production as the show was getting underway. I heard in the flea market: ‘sellers are looking for top dollar and buyers are looking for the cheapest deals.’ Things weren’t flying out of the flea market either.
Despite that, according to the Hamvention website, this year’s event was record-setting attendance at 35,877. I will always be of the belief “if you’ve never been to Hamvention, you need to go at least once in your life.” It’s more of a social and nightlife gathering, with vendors putting new gear ‘under glass’ at the show.
ARRL Network Incident
Not to bury the lead but I figure I would touch on the announcement posted on the ARRL website regarding the “serious incident involving access to our network and headquarters-based systems.” This incident was big enough news to make an online Cybersecurity trade publication, SecurityWeek. I don’t know anything more than the information made available in the league’s post but I suspect the last paragraph in the SecurityWeek article is the reason.
From the Information Security side, in this day and age, where everyone wants things to be convenient – conveniently accessible resources, conveniently ways to order things online, convenient ways to make membership changes, convenient apps to use – it’s not a matter of “if” something will be compromised, but “when” will something be compromised. The “when” for the ARRL happened to be right before Hamvention.
As noted in the ARRL post, people are asking if personal information is compromised – they haven’t said “yes” but it seems very likely. How an organization comes out looking in these trying times comes down to how they handle their responses – how they improve security posture, how they communicate the extent of the breach to its members, reporting to regulators/investigators, services offered to those concerned about their personal information, how they clean up and recover, making sure it doesn’t happen again, etc. If true, the “ARRL does not store credit card information anywhere on our systems, and we do not collect social security numbers” which helps with regulators and government but leaves privacy minded individuals who do not wish for personal details, albeit “publicly available,” to fall into the wrong hands.
Yes, this absolutely should not have happened. In a perfect world, it wouldn’t have happened. We don’t live in a perfect world and not everyone is perfect despite how some present themselves.
From my own experience, working with vendors and Managed Service Providers (MSPs), it takes a lot of extra work to make sure what they are telling you is correct and make sure what they do is correct. ARRL does use Microsoft services and they’ve had their share of scathing reports of inadequate security practices recently. I work with a lot of different Information Technology (IT) teams. The number of analysts (and management) that know very technical details about systems they are responsible – is remarkably low. When an analyst doesn’t know their system, doesn’t know how modifications affect that system, how would they know if a modification opens their organization to attack? Maybe an employee was thinking they were doing their job but clicked a password stealing link or downloaded a fake invoice containing a malicious payload (malware that performs malicious activity). The latter is often due to a lack of proper training in security practices for general employees. Again, these are only my experiences and observations working in IT.
The ARRL posting has been updated several times as recovery progresses and systems come back online. This disrupted most ARRL IT systems including phone systems, Logbook of the World (LoTW), VEC application processing, some magazine resources, store orders and shipping. LoTW data is “secure” presumably meaning no uploaded contact logs have been lost. The arrl.net forwarding system was not affected but I’ve been moving off it due to messages being bounced previously.
 Hey gang,
Hey gang, Pressure from lobbyists, entities with financing, and those out in front of specifications often have the upper hand due to influence and market position. Most want less regulation but we also want our stuff to work. Most regulation comes from vaguely written laws. Regulation stem from implementation, legal challenges, and administrative issues due to questions. Larger commercial entities are always looking at ways to improve their revenue steam and increase the stock price.
Pressure from lobbyists, entities with financing, and those out in front of specifications often have the upper hand due to influence and market position. Most want less regulation but we also want our stuff to work. Most regulation comes from vaguely written laws. Regulation stem from implementation, legal challenges, and administrative issues due to questions. Larger commercial entities are always looking at ways to improve their revenue steam and increase the stock price.